參考老師提供的bubbleRob_remoteAPI.ttt 檔案
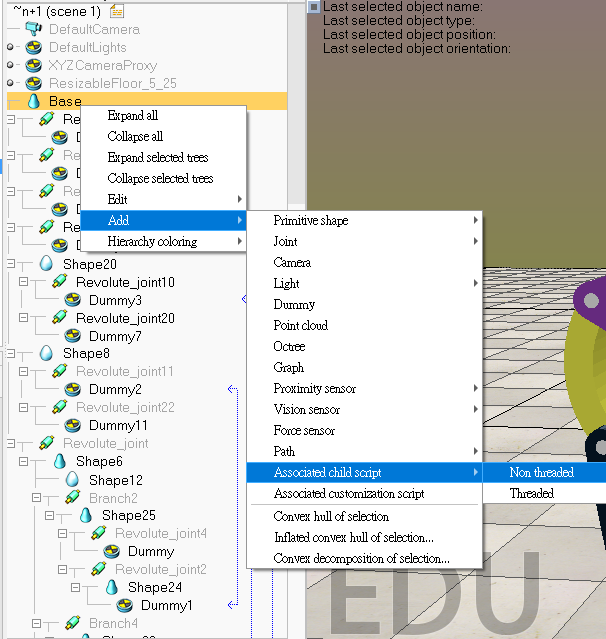
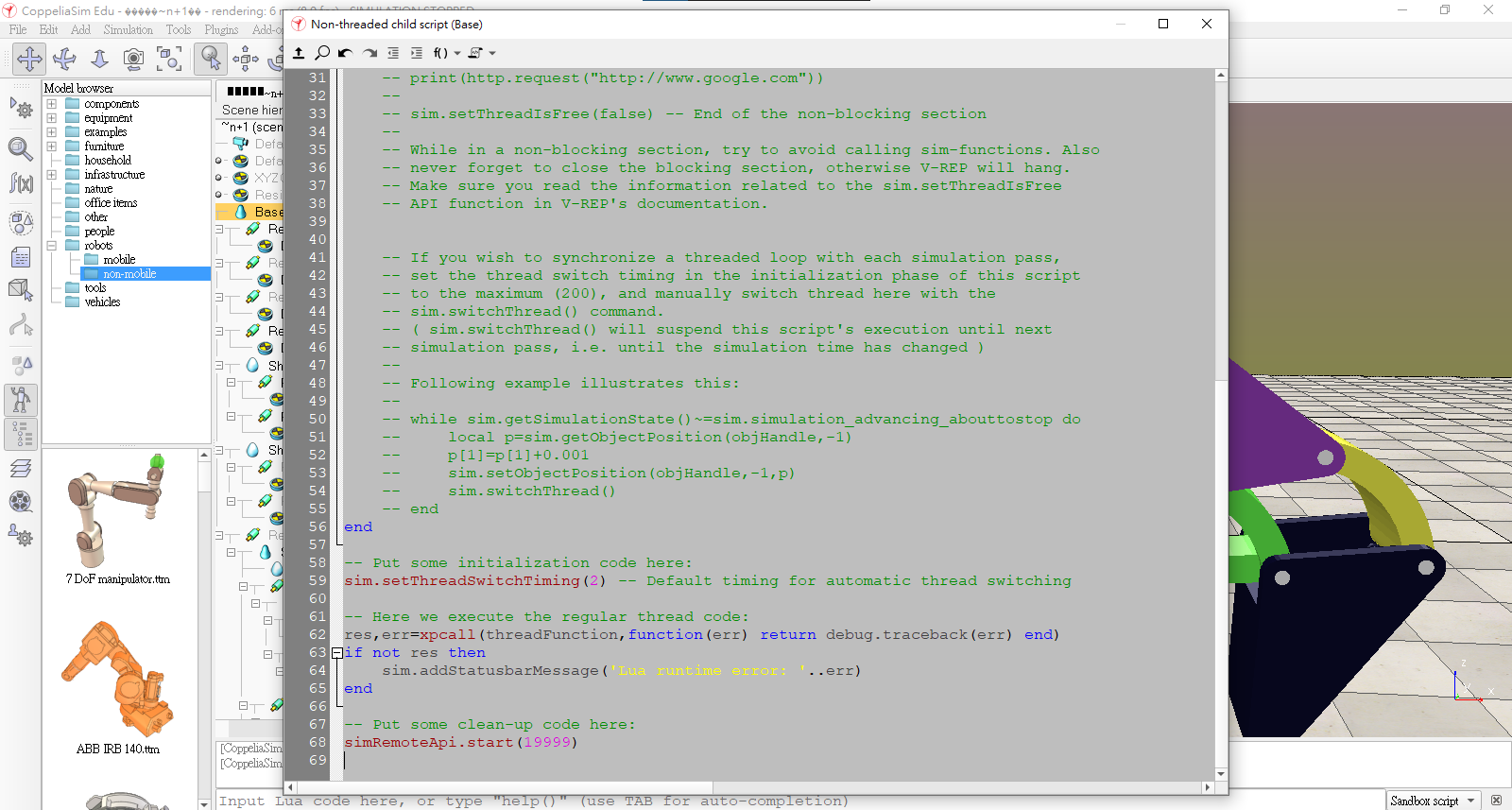
在自己Stage成品裡的Base裡新增程式
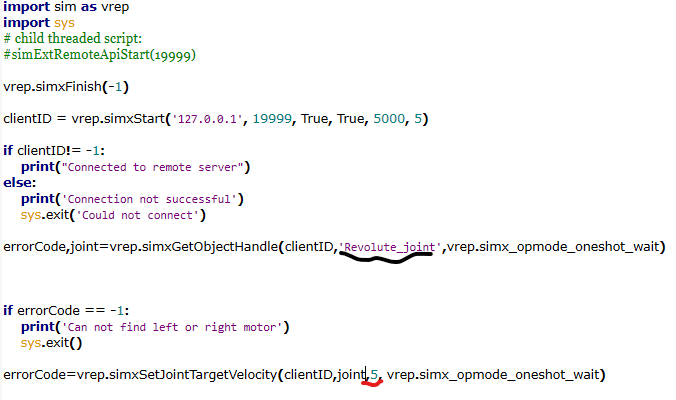
老師提供的bubbleRob_remoteAPI.py 修改 想要轉動的軸的名稱和轉速 (黑色的部分是名稱 紅色的地方是轉速)
完成操作影片:
Copyright © All rights reserved | This template is made with by Colorlib